The n-MNIST dataset (short for noisy MNIST) is created using the MNIST dataset of handwritten digits by adding -
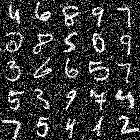
(1) additive white gaussian noise,
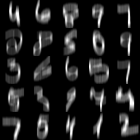
(2) motion blur and
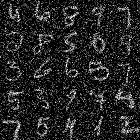
(3) a combination of additive white gaussian noise and reduced contrast to the MNIST dataset.
The datasets are available here:
n-mnist-with-awgn.gz
n-mnist-with-motion-blur.gz
n-mnist-with-reduced-contrast-and-awgn.gz
|
|
|
|
| n-MNIST with Additive White Gaussian Noise (AWGN) | n-MNIST with Motion Blur | n-MNIST with reduced contrast and AWGN |
| train_x | 60000x784 uint8 (containing 60000 training samples of 28x28 images each linearized into a 1x784 linear vector) |
| train_y | 60000x10 uint8 (containing 1x10 vectors having labels for the 60000 training samples) |
| test_x | 10000x784 uint8 (containing 10000 test samples of 28x28 images each linearized into a 1x784 linear vector) |
| test_y | 10000x10 uint8 (containing 1x10 vectors having labels for the 10000 test samples) |